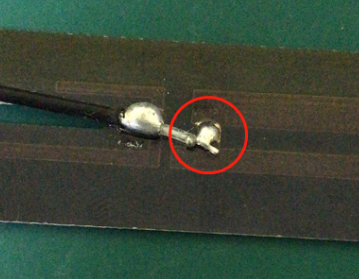
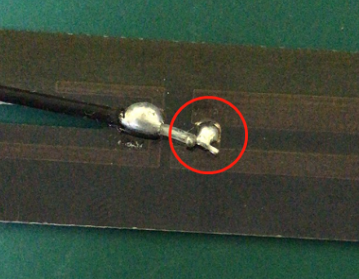
焊點(diǎn)缺陷檢測(cè)一直以來(lái)是很多地方都用的到,,但是有的對(duì)焊點(diǎn)是有要求的。不能過(guò)大,、不能芯線部分外漏等等一些瑕疵,。所以我們今天就來(lái)看看機(jī)器視覺(jué)來(lái)地帶人工實(shí)現(xiàn)焊點(diǎn)缺陷檢測(cè),。
【檢測(cè)內(nèi)容】
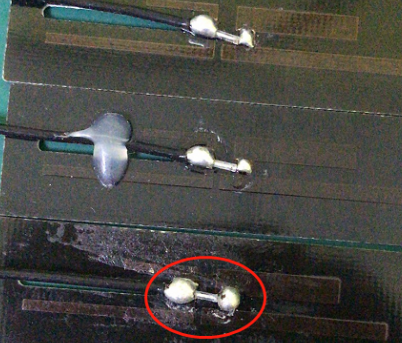
無(wú)焊點(diǎn),、 焊點(diǎn)過(guò)大,、 芯線部分外漏,、芯線未焊住、沒(méi)有芯線,、焊點(diǎn)或芯線偏移
【檢測(cè)指標(biāo)】
主要性能指標(biāo):X方向測(cè)量范圍0~7mm,,Z方向范圍0~5mm,精度±3μm,,重復(fù)精度1μm,。
【檢測(cè)原理】
利用激光三角反射原理,激光束被放大成一條激光線投射到被測(cè)物體表面上,,反射光透過(guò)高質(zhì)量光學(xué)系統(tǒng),,投射到成像矩陣上,經(jīng)計(jì)算得到傳感器到被測(cè)量表面的距離(Z軸)和沿著激光線的位置信息(X軸),,移動(dòng)被測(cè)量物體或者輪廓儀探頭,,就可以得到一組三維測(cè)量值。
【檢測(cè)步驟】
輪廓儀固定,,伺服機(jī)構(gòu)預(yù)先設(shè)置好檢測(cè)位置,,到達(dá)檢測(cè)位置后觸發(fā)輪廓儀取像,內(nèi)置算法分析產(chǎn)品為缺陷或者良品,,輸出OK或者NG信號(hào),。